
 Working process and technical advantages
Working process and technical advantages
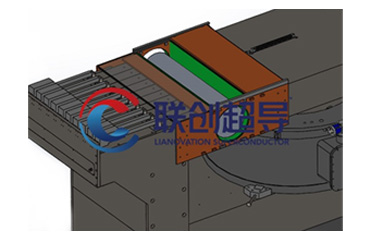
1) The servo hydraulic bracket receives the material at the upper position and then lowers to the middle position to locate the aluminum billet in the air gap。
2)Infeed open can be at upper or on the side. The feeding position is precisely controllable。
1)The hydraulic cylinders on both sides push the fixture of the spindle box against the aluminum billet and the bracket descends to the lower position。
2)The length of the workpiece can be up to 2.5 m。
1) The motor starts and accelerates quickly to the rated speed, driving the workpiece to rotate and heat in the magnetic field。
2)Two heating control modes of uniform and gradient are preset and the gradient is adjustable。
The bracket raises to the middle position and the hydraulic cylinders on both sides drive the spindle box fixtures off. The workpiece falls on the bracket and the bracket rises to the upper position。
The magnetic field for heating is adjustable by adjusting movable iron core, thereby aluminum billet’s heating temperature distribution is adjusted。
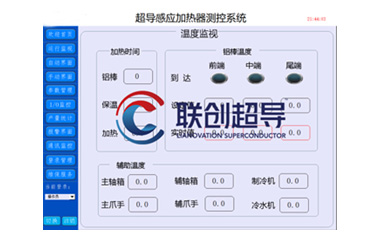
According to the temperature requirements of the workpiece heated, the magnetic field distribution and heating time can be automatically controlled by a delibrately designed algorithm to achieve one-click intelligent heating。
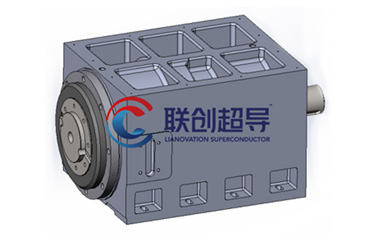
It can withstand complex load conditions such as high torque, strong pushing force, and alternating rotating stress under high magnetic field。
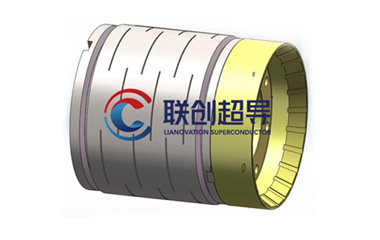
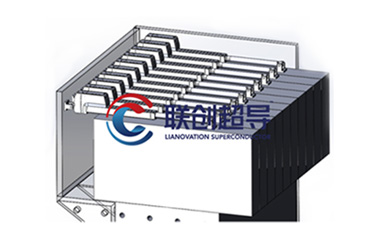
The non-magnetic and non-heat generating ceramic-metal composite structure has a low thermal conductivity and can isolate the aluminum billet from heat transfer。
Through multi-angle collision test and simulation optimization, a specially strengthened structure integrating heat insulation and protection is designed to form an openable heating air gap, which also has the function of heat preservation。

微信公众号

小程序
